dopamine
Overview
This document gives examples and pointers on how to experiment with and extend Dopamine.
You can find the documentation for each module in our codebase in our API documentation.
File organization
Dopamine is organized as follows:
jaxcontains jax agent implementations and networks.agentscontains tenforflow agent implementations.ataricontains Atari-specific code, including code to run experiments and preprocessing code.commoncontains additional helper functionality, including logging and checkpointing.replay_memorycontains the replay memory schemes used in Dopamine.colabcontains code used to inspect the results of experiments, as well as example colab notebooks.testscontains all our test files.
Training agents
Atari games
The entry point to the standard Atari 2600 experiment is
dopamine/discrete_domains/train.py.
To run the basic DQN agent,
python -um dopamine.discrete_domains.train \
--base_dir /tmp/dopamine_runs \
--gin_files dopamine/agents/dqn/configs/dqn.gin
By default, this will kick off an experiment lasting 200 million frames. The command-line interface will output statistics about the latest training episode:
[...]
I0824 17:13:33.078342 140196395337472 tf_logging.py:115] gamma: 0.990000
I0824 17:13:33.795608 140196395337472 tf_logging.py:115] Beginning training...
Steps executed: 5903 Episode length: 1203 Return: -19.
To get finer-grained information about the process, you can adjust the
experiment parameters in
dopamine/agents/dqn/configs/dqn.gin,
in particular by reducing Runner.training_steps and Runner.evaluation_steps,
which together determine the total number of steps needed to complete an
iteration. This is useful if you want to inspect log files or checkpoints, which
are generated at the end of each iteration.
More generally, the whole of Dopamine is easily configured using the gin configuration framework.
Non-Atari discrete environments
We provide sample configuration files for training an agent on Cartpole and Acrobot. For example, to train C51 on Cartpole with default settings, run the following command:
python -um dopamine.discrete_domains.train \
--base_dir /tmp/dopamine_runs \
--gin_files dopamine/agents/rainbow/configs/c51_cartpole.gin
You can train Rainbow on Acrobot with the following command:
python -um dopamine.discrete_domains.train \
--base_dir /tmp/dopamine_runs \
--gin_files dopamine/agents/rainbow/configs/rainbow_acrobot.gin
Continuous control environments
The entry point for continuous control agents is
dopamine/continuous_domains/train.py.
You will need a Mujoco key to run the following example. To run SAC on the
HalfCheetah environment of Mujoco, run:
python -um dopamine.continuous_domains.train \
--base_dir /tmp/dopamine_runs \
--gin_files dopamine/jax/agents/sac/configs/sac.gin
By default, this will kick off an experiment lasting 3200 episodes, with 1000 environment steps per episode. The command-line interface will output statistics about the latest training episode:
[...]
I0908 17:19:39.618797 1803949 run_experiment.py:446] Starting iteration 0
I0908 17:19:40.592262 1803949 run_experiment.py:405] Average undiscounted return per training episode: -168.19
I0908 17:19:40.592391 1803949 run_experiment.py:407] Average training steps per second: 1027.80
I0908 17:19:45.699378 1803949 run_experiment.py:427] Average undiscounted return per evaluation episode: -279.07
To run with different environments/hyperparemeters, adjust the gin config file
found here:
dopamine/jax/agents/sac/configs/sac.gin.
For your experiments, you may choose to supply a new gin config file, or
override the existing config file with command line gin_bindings args.
For more information on using gin, see the gin github repo.
Configuring agents
The whole of Dopamine is easily configured using the gin configuration framework.
We provide a number of configuration files for each of the agents. The main configuration file for each agent corresponds to an “apples to apples” comparison, where hyperparameters have been selected to give a standardized performance comparison between agents. These are
dopamine/agents/dqn/configs/dqn.gindopamine/agents/rainbow/configs/c51.gindopamine/agents/rainbow/configs/rainbow.gindopamine/agents/implicit_quantile/configs/implicit_quantile.gin
More details on the exact choices behind these parameters are given in our baselines page.
We also provide configuration files corresponding to settings previously used in the literature. These are
dopamine/agents/dqn/configs/dqn_nature.gin(Mnih et al., 2015)dopamine/agents/dqn/configs/dqn_icml.gin(Bellemare et al., 2017)dopamine/agents/rainbow/configs/c51_icml.gin(Bellemare et al., 2017)dopamine/agents/implicit_quantile/configs/implicit_quantile_icml.gin(Dabney et al., 2018)
All of these use the deterministic version of the Arcade Learning Environment (ALE), and slightly different hyperparameters.
Checkpointing and logging
Dopamine provides basic functionality for performing experiments. This
functionality can be broken down into two main components: checkpointing and
logging. Both components depend on the command-line parameter base_dir,
which informs Dopamine of where it should store experimental data.
Checkpointing
By default, Dopamine will save an experiment checkpoint every iteration: one
training and one evaluation phase, following a standard set by
Mnih et al. Checkpoints are saved in the checkpoints subdirectory under
base_dir. At a high-level, the following are checkpointed:
- Experiment statistics (number of iterations performed, learning curves,
etc.). This happens in
dopamine/atari/run_experiment.py, in the methodrun_experiment. - Agent variables, including the tensorflow graph. This happens in
dopamine/agents/dqn/dqn_agent.py, in the methodsbundle_and_checkpointandunbundle. - Replay buffer data. Atari 2600 replay buffers have a large memory footprint.
As a result, Dopamine uses additional code to keep memory usage low. The
relevant methods are found in
dopamine/agents/replay_memory/circular_replay_buffer.py, and are calledsaveandload.
If you’re curious, the checkpointing code itself is in
dopamine/common/checkpointer.py.
Logging
At the end of each iteration, Dopamine also records the agent’s performance,
both during training and (if enabled) during an optional evaluation phase. The
log files are generated in
dopamine/atari/run_experiment.py
and more specifically in
dopamine/common/logger.py,
and are pickle files containing a dictionary mapping iteration keys (e.g.,
"iteration_47") to dictionaries containing data.
A simple way to read log data from multiple experiments is to use the provided
read_experiment
method in
colab/utils.py.
We provide a colab to illustrate how you can load the statistics from an experiment and plot them against our provided baseline runs.
Modifying and extending agents
Dopamine is designed to make algorithmic research simple. With this in mind, we decided to keep a relatively flat class hierarchy, with no abstract base class; we’ve found this sufficient for our research purposes, with the added benefits of simplicity and ease of use. To begin, we recommend modifying the agent code directly to suit your research purposes.
We provide a colab where we illustrate how one can extend the DQN agent, or create a new agent from scratch, and then plot the experimental results against our provided baselines.
DQN
The DQN agent is contained in two files:
- The agent class, in
dopamine/agents/dqn/dqn_agent.py. - The replay buffer, in
dopamine/replay_memory/circular_replay_buffer.py.
The agent class defines the DQN network, the update rule, and also the basic
operations of a RL agent (epsilon-greedy action selection, storing transitions,
episode bookkeeping, etc.). For example, the Q-Learning update rule used in DQN
is defined in two methods, _build_target_q_op and _build_train_op.
Rainbow and C51
The Rainbow agent is contained in two files:
- The agent class in
dopamine/agents/rainbow/rainbow_agent.py, inheriting from the DQN agent. - The replay buffer in
dopamine/replay_memory/prioritized_replay_buffer.py, inheriting from DQN’s replay buffer.
The C51 agent is a specific parametrization of the Rainbow agent, where
update_horizon (the n in n-step update) is set to 1 and a uniform replay
scheme is used.
Implicit quantile networks (IQN)
The IQN agent is defined by one additional file:
dopamine/agents/implicit_quantile/implicit_quantile_agent.py, inheriting from the Rainbow agent.
Downloads
We provide a series of files for all 4 agents on all 60 games. These are all
*.tar.gz files which you will need to uncompress:
- The raw logs are available
here
- You can view this colab for instructions on how to load and visualize them.
- The compiled pickle files are available
here
- We make use of these compiled pickle files in both agents and the statistics colabs.
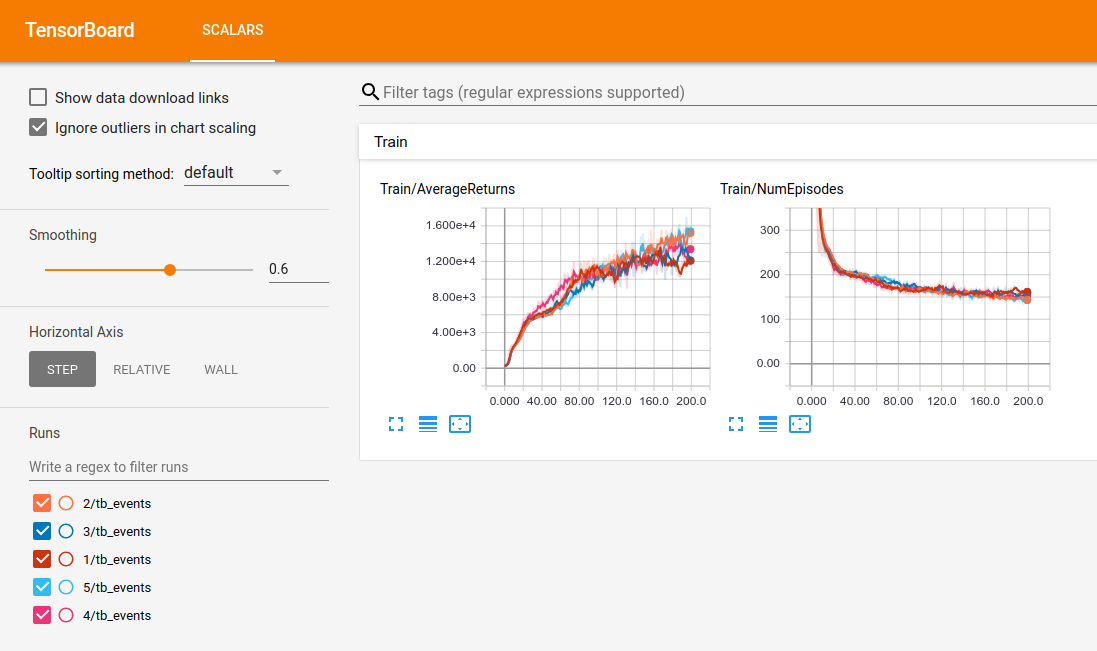
- The Tensorboard event files are available
here
- We provide a
colab
where you can start Tensorboard directly from the colab using
ngrok. In the provided example your Tensorboard will look something like this:
- We provide a
colab
where you can start Tensorboard directly from the colab using

* You can also view these with Tensorboard on your machine. For instance, after
uncompressing the files you can run:
```
tensorboard --logdir c51/Asterix/
```
to display the training runs for C51 on Asterix:
- The TensorFlow checkpoint files for 5 independent runs of the 4 agents on
all 60 games are available. The format for each of the files is:
https://storage.cloud.google.com/download-dopamine-rl/lucid/${AGENT}/${GAME}/${RUN}/tf_ckpt-199.${SUFFIX}, where:AGENTcan be “dqn”, “c51”, “rainbow”, or “iqn”.GAMEcan be any of the 60 games.RUNcan be 1, 2, 3, 4, or 5SUFFIXcan be one ofdata-00000-of-00001,index, ormeta.
- You can also download all of these as a single
.tar.gzfile. Note: these files are quite large, over 15Gb each.